回転行列は、固定された座標系の中で点を原点回りに回転させる行列である。これに対して、座標変換行列は座標系そのものを原点回りに回転させるような行列である。座標が回転すると同じ点でもその座標は異なる。回転行列の角度の符号を逆にしたものが座標変換行列に相当する。これは、座標を回転させる操作が、点を逆方向に回転させる操作と同等であることによる。
回転行列
点 \(r\) を \(\theta\) 回転させて点 \(r’\) になると考える。
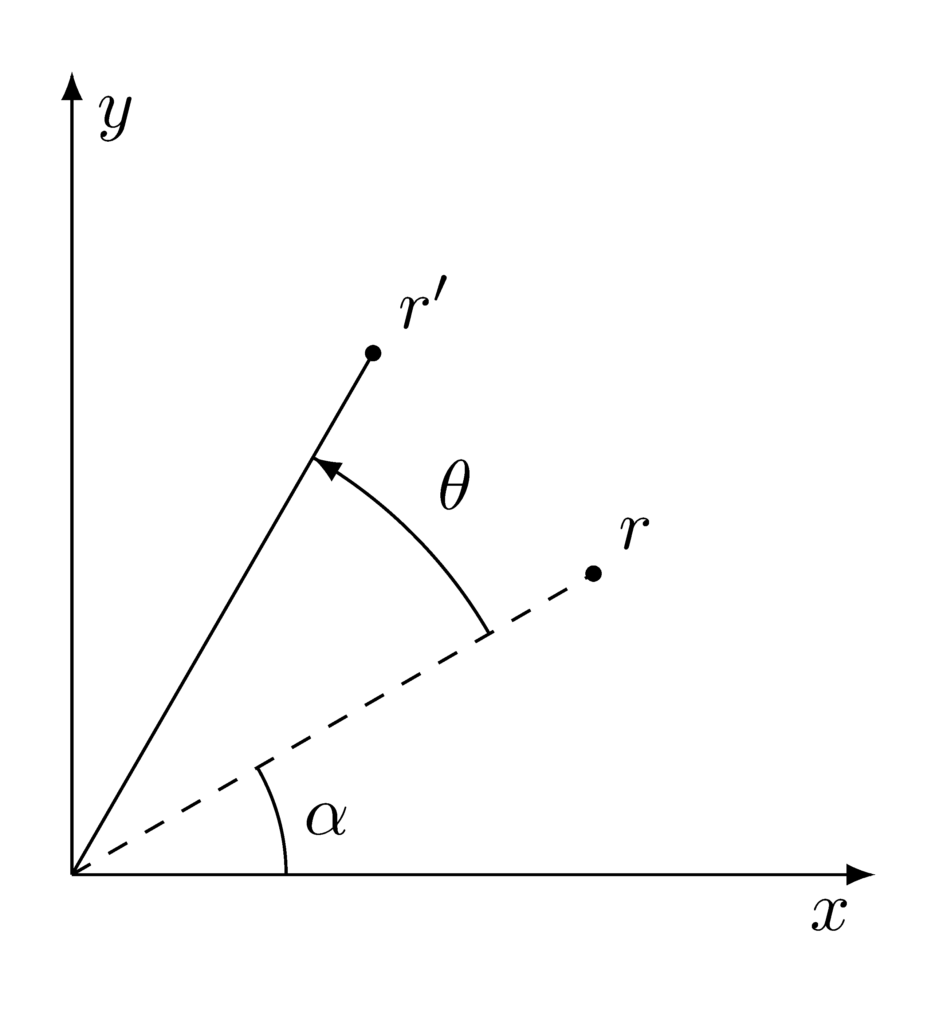
\(r\) の座標は以下のよう表される。
\[r = \left(\begin{array}{c}
x \\
y \\
\end{array}\right)
=
\left(\begin{array}{c}
r\cos{\alpha} \\
r\sin{\alpha} \\
\end{array}\right)\]
\(r’\) の座標は、三角関数の加法定理を用いて以下のように表される。
\[\begin{eqnarray}
r’ = \left(\begin{array}{c}
x’ \\
y’ \\
\end{array}\right)
& = &
\left(\begin{array}{c}
r\cos{(\alpha+\theta)} \\
r\sin{(\alpha+\theta)} \\
\end{array}\right) \\
& = &
\left(\begin{array}{c}
r\cos{\alpha}\cos{\theta}-r\sin{\alpha}\sin{\theta} \\
r\sin{\alpha}\cos{\theta}+r\cos{\alpha}\sin{\theta} \\
\end{array}\right) \\
& = &
\left(\begin{array}{c}
x\cos{\theta}-y\sin{\theta} \\
x\sin{\theta}+y\cos{\theta} \\
\end{array}\right)
\end{eqnarray}\]
従って、
\[\begin{equation}
\left(\begin{array}{c}
x’ \\
y’ \\
\end{array}\right)
=
\left[\begin{array}{cc}
\cos{\theta} & -\sin{\theta} \\
\sin{\theta} & \cos{\theta} \\
\end{array}\right]
\left(\begin{array}{c}
x \\
y \\
\end{array}\right)
\end{equation}\]
となる。これを拡張すれば、3次元における回転行列が得られる。
\[\begin{equation}
R_x(\theta)
=
\left[\begin{array}{ccc}
1 & 0 & 0 \\
0 & \cos{\theta} & -\sin{\theta} \\
0 & \sin{\theta} & \cos{\theta} \\
\end{array}\right]
\end{equation}\]
\[\begin{equation}
R_y(\theta)
=
\left[\begin{array}{ccc}
\cos{\theta} & 0 & \sin{\theta} \\
0 & 1 & 0 \\
-\sin{\theta} & 0 & \cos{\theta} \\
\end{array}\right]
\end{equation}\]
\[\begin{equation}
R_z(\theta)
=
\left[\begin{array}{ccc}
\cos{\theta} & -\sin{\theta} & 0 \\
\sin{\theta} & \cos{\theta} & 0\\
0 & 0 & 1 \\
\end{array}\right]
\end{equation}\]
座標変換行列
座標系 (\(x,y\)) を \(\theta\) 回転させて座標系 (\(x’,y’\)) になる場合を考える。
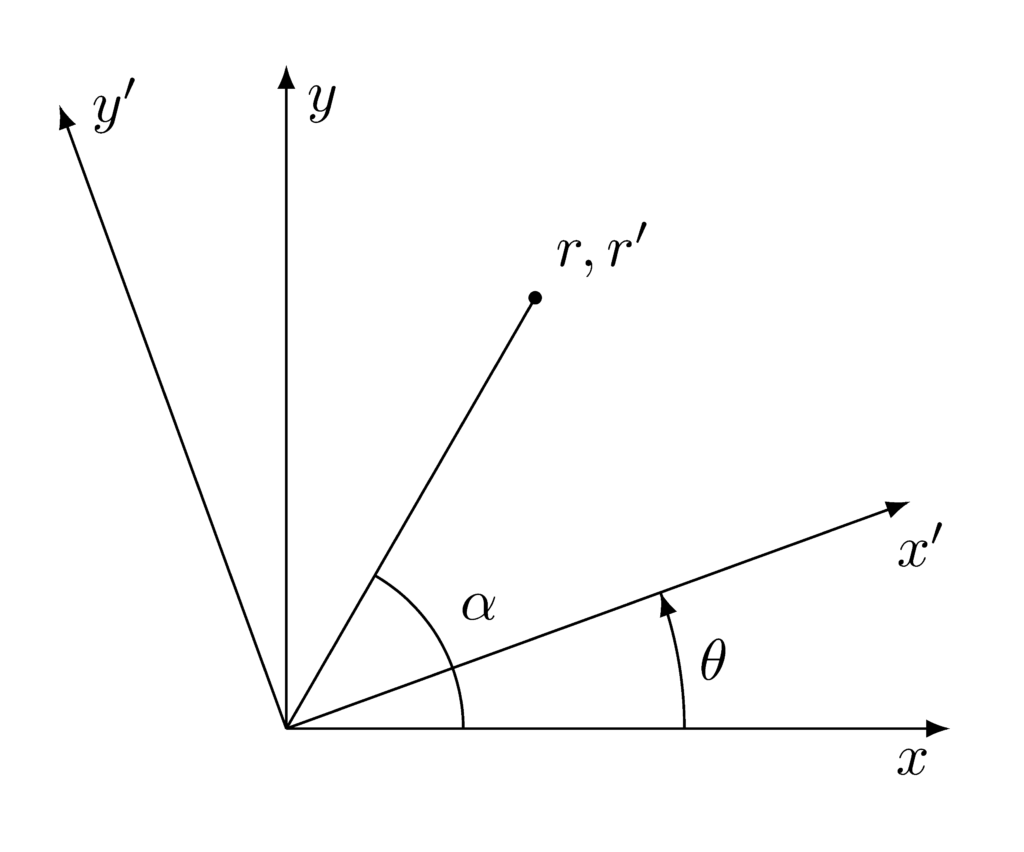
\(r\) の座標は以下のよう表される。
\[r = \left(\begin{array}{c}
x \\
y \\
\end{array}\right)
=
\left(\begin{array}{c}
r\cos{\alpha} \\
r\sin{\alpha} \\
\end{array}\right)\]
\(r’\)の座標は、三角関数の加法定理を用いて以下のように表される。
\[\begin{eqnarray}
r’ = \left(\begin{array}{c}
x’ \\
y’ \\
\end{array}\right)
& = &
\left(\begin{array}{c}
r\cos{(\alpha-\theta)} \\
r\sin{(\alpha-\theta)} \\
\end{array}\right) \\
& = &
\left(\begin{array}{c}
r\cos{\alpha}\cos{\theta}+r\sin{\alpha}\sin{\theta} \\
r\sin{\alpha}\cos{\theta}-r\cos{\alpha}\sin{\theta} \\
\end{array}\right) \\
& = &
\left(\begin{array}{c}
x\cos{\theta}+y\sin{\theta} \\
-x\sin{\theta}+y\cos{\theta} \\
\end{array}\right)
\end{eqnarray}\]
従って、
\[\begin{equation}
\left(\begin{array}{c}
x’ \\
y’ \\
\end{array}\right)
=
\left[\begin{array}{cc}
\cos{\theta} & \sin{\theta} \\
-\sin{\theta} & \cos{\theta} \\
\end{array}\right]
\left(\begin{array}{c}
x \\
y \\
\end{array}\right)
\end{equation}\]
となる。これを3次元に拡張すれば、回転行列が得られる。
\[\begin{equation}
C_x(\theta)
=
\left[\begin{array}{ccc}
1 & 0 & 0 \\
0 & \cos{\theta} & \sin{\theta} \\
0 & -\sin{\theta} & \cos{\theta} \\
\end{array}\right]
\end{equation}\]
\[\begin{equation}
C_y(\theta)
=
\left[\begin{array}{ccc}
\cos{\theta} & 0 & -\sin{\theta} \\
0 & 1 & 0 \\
\sin{\theta} & 0 & \cos{\theta} \\
\end{array}\right]
\end{equation}\]
\[\begin{equation}
C_z(\theta)
=
\left[\begin{array}{ccc}
\cos{\theta} & \sin{\theta} & 0 \\
-\sin{\theta} & \cos{\theta} & 0\\
0 & 0 & 1 \\
\end{array}\right]
\end{equation}\]
座標変換行列は、回転行列において \(\theta=-\theta\) と置き換えることで得られる。