ヒルの方程式(Hill’s equations)とは,宇宙機のランデブーにおいて,ターゲット(ランデブーの目標物体)に対するチェイサー(ランデブーを行う物体)の相対運動を表す式です.この記事では,宇宙機の相対運動を表すヒルの方程式の意味とその導出,及びその一般解であるC-W解(Clohessy-Wiltshire解)の求め方を解説します.
ヒルの方程式(Hill’s equations)とは?
宇宙機(人工衛星や宇宙船)を他の宇宙機に対して接近させることを,ランデブー(Rendezvous)といい,ランデブーの目標物体をターゲット(Target),ランデブーを行う物体をチェイサー(Chaser)と呼びます.ヒルの方程式は,円軌道上を周回するターゲットに対してその近傍にあるチェイサーの運動を表す方程式です.ヒルの方程式は次のように表されます.
\[\begin{eqnarray}
\ddot{x}-2\omega\dot{y}-3\omega^2x & = & f_x \\
\ddot{y}+2\omega\dot{x} & = & f_y \\
\ddot{z}+\omega^2z & = & f_z
\end{eqnarray}\]
ヒルの方程式はHill(1878)によって初めて導き出され,その後ClohessyとWiltshire(1960)の軌道上のランデブーに関する研究で再発見されたものです.そのため,ヒルの方程式はClohessy-Wiltshire方程式やC-W方程式と呼ぶこともあります.
ヒルの方程式の導出
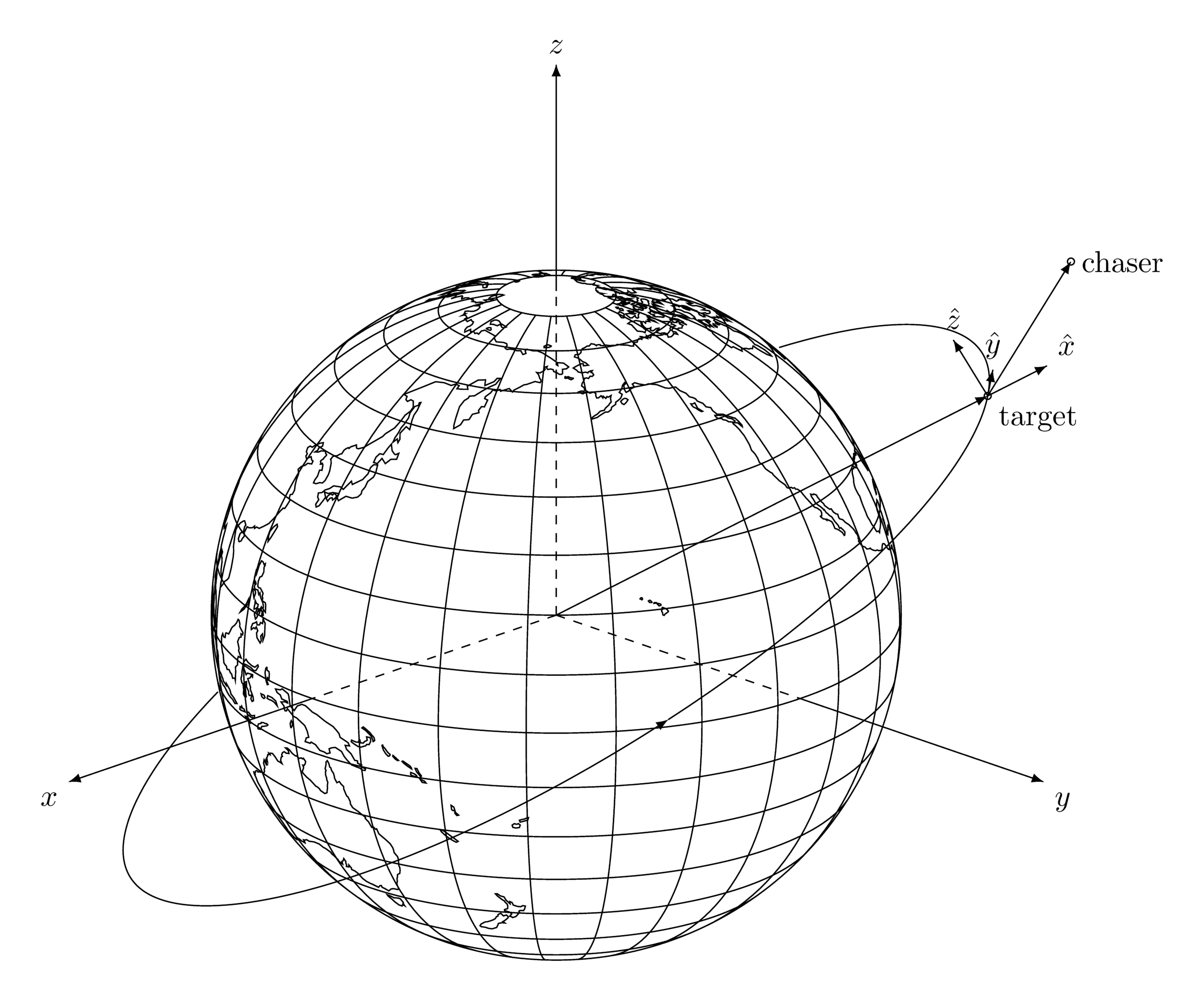
ターゲットは地球を中心に円軌道を周回しているとし,座標系を定義します.ターゲットを原点とし,地球中心からターゲットの方向に\(x\)軸,ターゲットの進行方向に\(y\)軸をとり,それらと右手系をなすように\(z\)軸を定めます.
ターゲットの位置ベクトルを\(\boldsymbol{r}_t\),チェイサーの位置ベクトルを\(\boldsymbol{r}_c\)とします.それぞれの運動方程式は,地心重力定数を\(\mu\),チェイサーに働く外力加速度ベクトルを\(f\)とすると,
\[\frac{d^2\boldsymbol{r}_t}{dt^2} = -\mu\frac{\boldsymbol{r}_t}{r^3_t}\]
\[\frac{d^2\boldsymbol{r}_c}{dt^2} = -\mu\frac{\boldsymbol{r}_c}{r^3_c}+\boldsymbol{f}\]
が成り立ちます.ここで,相対位置ベクトル\(\boldsymbol{r} =\boldsymbol{r}_c -\boldsymbol{r}_t\)を導入すれば,
\[\frac{d^2\boldsymbol{r}}{dt^2} = -\mu\frac{\boldsymbol{r}_c}{r^3_c}+\mu\frac{\boldsymbol{r}_t}{r^3_t}+\boldsymbol{f}\]
と書けます.ここで,
\[\begin{eqnarray}
r^2_c & = & (\boldsymbol{r}_t + \boldsymbol{r})^2 \\
& = & r^2_t + 2\boldsymbol{r}_t\cdot\boldsymbol{r} + r^2 \\
& = & r^2_t \left[1 + \frac{2\boldsymbol{r}_t\cdot\boldsymbol{r}}{r^2_t} + \left(\frac{r}{r_t}\right)^2\right]\end{eqnarray}\]
両辺を\(-\frac{3}{2}\)乗すれば,
\[\boldsymbol{r}^{-3}_c = r^{-3}_t \left[1 + \frac{2\boldsymbol{r}_t\cdot\boldsymbol{r}}{r^2_t} + \left(\frac{r}{r_t}\right)^2\right]^{-\frac{3}{2}}\]
\(r << r_t\)を考慮すれば,
\[\boldsymbol{r}^{-3}_c = r^{-3}_t \left[1 + \frac{2\boldsymbol{r}_t\cdot\boldsymbol{r}}{r^2_t}\right]^{-\frac{3}{2}}\]
近似式\((1+x)^p = 1+px\)を使えば,
\[\boldsymbol{r}^{-3}_c = r^{-3}_t \left(1 – 3\frac{\boldsymbol{r}_t\cdot\boldsymbol{r}}{r^2_t}\right)\]
となります.これを元の式に代入して,
\[\frac{d^2\boldsymbol{r}}{dt^2} = -\mu\frac{1}{r^3_t}\left(- 3\frac{\boldsymbol{r}_t\cdot\boldsymbol{r}}{r^2_t}\boldsymbol{r_t} + \boldsymbol{r}\right) +\boldsymbol{f}\]
また,回転座標系における位置ベクトルの時間微分より,
\[\frac{d^2\boldsymbol{r}}{dt^2} = \boldsymbol{a}’ + 2\boldsymbol{\omega} \times \boldsymbol{v’} + \boldsymbol{\omega} \times (\boldsymbol{\omega} \times \boldsymbol{r’}) + \dot{\boldsymbol{\omega}} \times \boldsymbol{r’}\]
よって,\(\omega = \sqrt{\frac{\mu}{r^3_t}}\)とおけば,
\[\left(\begin{array}{c} 2\omega^2x \\ -\omega^2y \\ -\omega^2z \end{array}\right) + \left(\begin{array}{c} f_x \\ f_y \\ f_z \end{array}\right) = \left(\begin{array}{c} \ddot{x} \\ \ddot{y} \\ \ddot{z} \end{array}\right) + 2\left(\begin{array}{c} -\omega\dot{y} \\ \omega\dot{x} \\ 0 \end{array}\right) + \left(\begin{array}{c} 0 \\ 0 \\ \omega^2z \end{array}\right) + \left(\begin{array}{c} -\omega^2x \\ -\omega^2y \\ -\omega^2z \end{array}\right)
\]
整理すれば,
\[\begin{eqnarray}
\ddot{x}-2\omega\dot{y}-3\omega^2x & = & f_x \\
\ddot{y}+2\omega\dot{x} & = & f_y \\
\ddot{z}+\omega^2z & = & f_z
\end{eqnarray}\]
となります.
C-W解(Clohessy-Wiltshire解)の導出
ヒルの方程式の外力がない場合を考えます.
\[\begin{eqnarray}
\ddot{x}-2\omega\dot{y}-3\omega^2x & = & 0 \tag{1} \\
\ddot{y}+2\omega\dot{x} & = & 0 \tag{2}\\
\ddot{z}+\omega^2z & = & 0 \tag{3}
\end{eqnarray}\]
\(x\)と\(y\)は連成しているので,消去法で解きます.(2)式を積分して,
\[\dot{y}+2\omega x = C_1 \tag{4}\]
この式を(1)式に代入すれば,
\[\ddot{x}+\omega^2 x = 2\omega C_1 \tag{5}\]
となるので,これを解くと,
\[x = \frac{2}{\omega}C_1+C_2\cos{\omega t}+C_3\sin{\omega t} \tag{6}\]
さらに微分すると,
\[\dot{x} = -C_2\omega\sin{\omega t}+C_3\omega\cos{\omega t} \tag{7}\]
と表せます.(6)式を(4)に代入すると,
\[\dot{y} = -3C_1-2C_2\omega\cos{\omega t}-2C_3\omega\sin{\omega t} \tag{8}\]
これを積分すれば,
\[y = -3C_1t-2C_2\sin{\omega t}+2C_3\cos{\omega t}+C_4 \tag{9}\]
となります.(6)-(9)式に\(t=0\)を代入すると,
\[\begin{eqnarray}
x_0 & = & \frac{2}{\omega}C_1 + C_2\tag{10} \\
\dot{x}_0 & = & C_3\omega \tag{11}\\
\dot{y}_0 & = & -3C_1-2C_2\omega \tag{12}\\
y_0 & = & 2C_3+C_4 \tag{13}
\end{eqnarray}\]
これを解けば,
\[\begin{eqnarray}
C_1 & = & 2\omega x_0+\dot{y}_0\tag{14} \\
C_2 & = & -3x_0-\frac{2}{\omega}\dot{y}_0 \tag{15}\\
C_3 & = & \frac{1}{\omega}\dot{x}_0 \tag{16}\\
C_4 & = & -\frac{2}{\omega}\dot{x}_0+y_0 \tag{17}
\end{eqnarray}\]
と解けます.z方向は独立しているので,(3)式を解いて,
\[z = C_5\cos{\omega t}+C_6\sin{\omega t} \tag{18}\]
\[\dot{z} = -C_5\omega\sin{\omega t}+C_6\omega\cos{\omega t} \tag{19}\]
(18)-(19)式に\(t=0\)を代入して定数を求めると,
\[\begin{eqnarray}
C_5 & = & z_0 \tag{20} \\
C_6 & = & \frac{\dot{z}_0}{\omega} \tag{21}
\end{eqnarray}\]
となります.以上より,定数を代入すれば次の6式が導けます.
\[\begin{eqnarray}
x & = & (4-3\cos{\omega t})x_0+\frac{\sin{\omega t}}{\omega}\dot{x}_0+\frac{2}{\omega}(1-\cos{\omega t})\dot{y}_0 \\
y & = & 6(\sin{\omega t} – \omega t)x_0+y_0+\frac{2}{\omega}(\cos{\omega t}-1)\dot{x}_0+\frac{1}{\omega}(4\sin{\omega t}-3\omega t)\dot{y}_0 \\
z & = & (\cos{\omega t})z_0+\frac{1}{\omega}(\sin{\omega t})\dot{z}_0 \\
\dot{x} & = & (3\omega\sin{\omega t})x_0 + (\cos{\omega t})\dot{x}_0+(2\sin{\omega t})\dot{y}_0 \\
\dot{y} & = & 6\omega(\cos{\omega t}-1)x_0-2(\sin{\omega t})\dot{x}_0+(4\cos{\omega t}-3)\dot{y}_0 \\
\dot{z} & = & -\omega(\sin{\omega t})z_0 + (\cos{\omega t})\dot{z}_0 \\
\end{eqnarray}\]
これを行列で書けば,
\[\small{\begin{equation}\left[\begin{array}{c}
x(t) \\
y(t) \\
z(t) \\
\dot{x}(t) \\
\dot{y}(t) \\
\dot{z}(t) \\
\end{array}\right]
=
\left[\begin{array}{cccccc}
4-3c & 0 & 0 & s/w & 2(1-c)/w & 0 \\
6(s-\omega t) & 1 & 0 & -2(1-c)/\omega & (4s-3\omega t)/\omega & 0 \\
0 & 0 & c & 0 & 0 & s/\omega \\
3\omega s & 0 & 0 & c & 2s & 0 \\
-6\omega(1-c) & 0 & 0 & -2s & -3+4c & 0 \\
0 & 0 & -\omega s & 0 & 0 & c \\
\end{array}\right]
\left[\begin{array}{c}
x_0 \\
y_0 \\
z_0 \\
\dot{x}_0 \\
\dot{y}_0 \\
\dot{z}_0 \\
\end{array}\right]\end{equation}}\]
となります.ただし,\(c=\cos{\omega t}\),\(s=\sin{\omega t}\)です.これがC-W解(Clohessy-Wiltshire解)になります.
まとめ
ヒルの方程式の説明から,ヒルの方程式の一般解であるC-W解(Clohessy-Wiltshire解)の導出まで行いました.チェイサーがターゲット近傍を運動している時は,この解を使って運動を解析することができます.実際に技術試験衛星IIV型「きく7号(ETS-VII)」おりひめ・ひこぼしによるランデブ・ドッキング実験ではヒルの方程式がされました.https://www.jaxa.jp/projects/sat/ets7/index_j.htm