ICM-20602 Breakout Board は TDK (invenSense) 社の6軸センサICM-20602を搭載した実験用基板です。
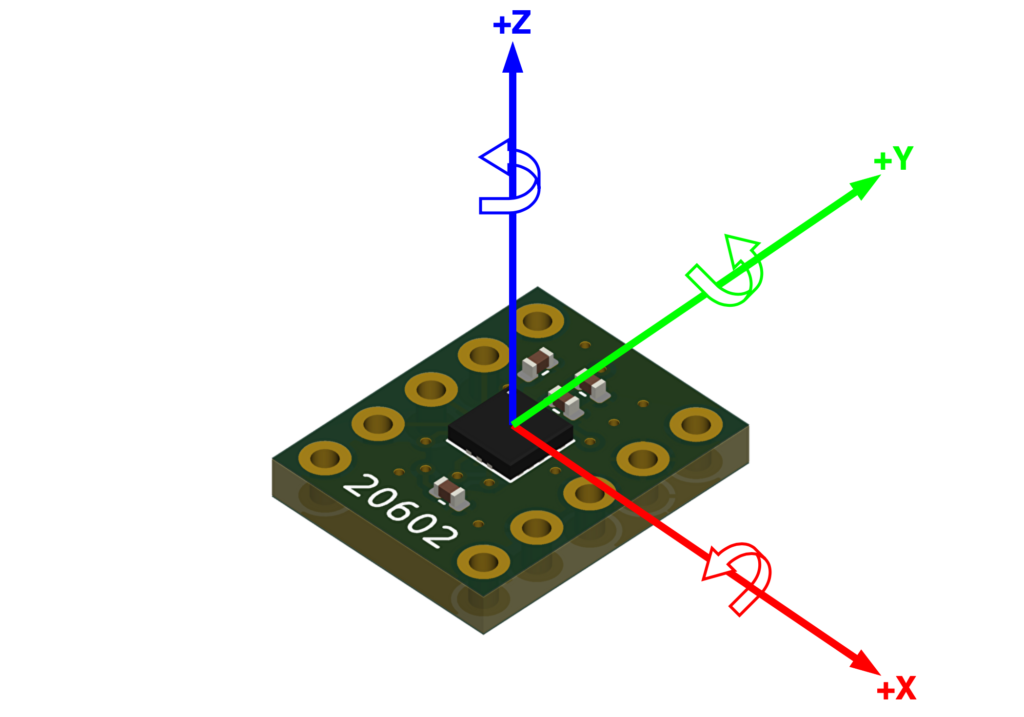
直交する3軸の加速度と角速度を測定することができます。
軸方向
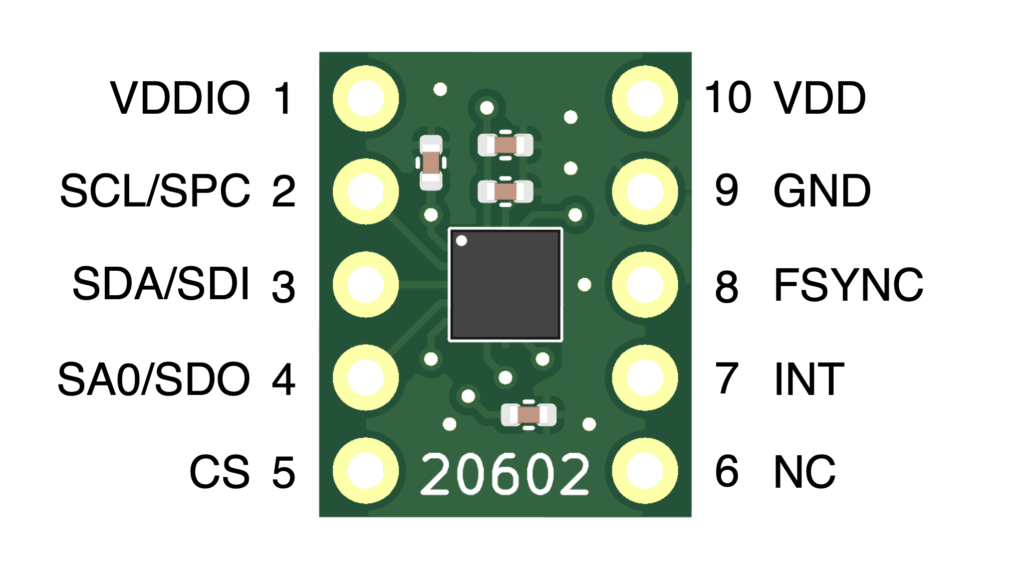
ピン配置
配線例

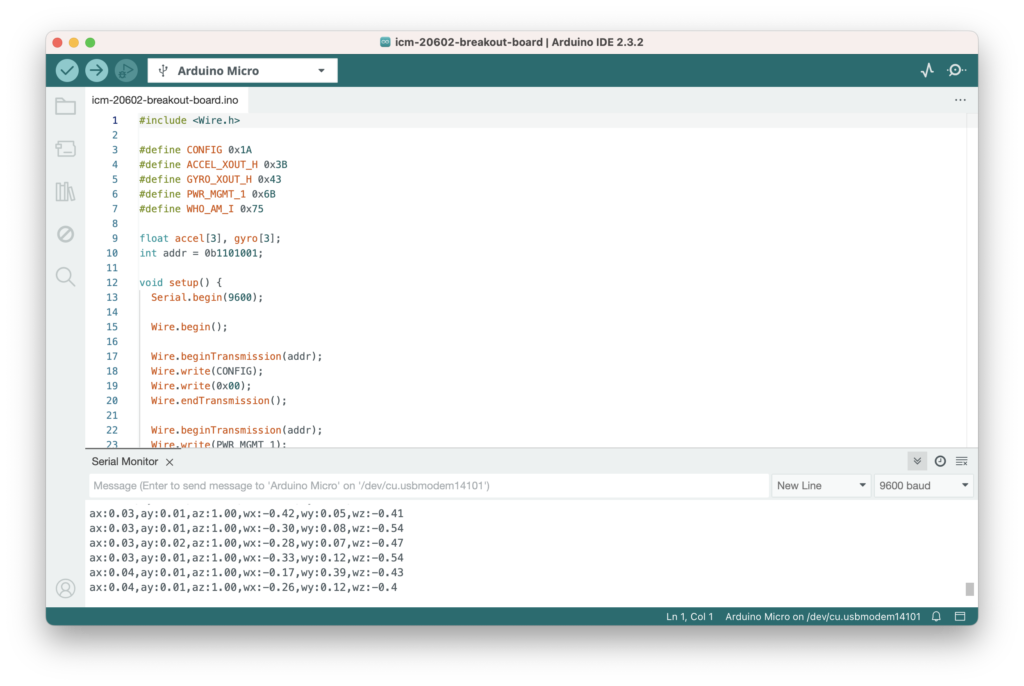
サンプルプログラム
#include <Wire.h>
#define CONFIG 0x1A
#define ACCEL_XOUT_H 0x3B
#define GYRO_XOUT_H 0x43
#define PWR_MGMT_1 0x6B
#define WHO_AM_I 0x75
float accel[3], gyro[3];
int addr = 0b1101001;
void setup() {
Serial.begin(9600);
Wire.begin();
Wire.beginTransmission(addr);
Wire.write(CONFIG);
Wire.write(0x00);
Wire.endTransmission();
Wire.beginTransmission(addr);
Wire.write(PWR_MGMT_1);
Wire.write(0x01);
Wire.endTransmission();
Wire.beginTransmission(addr);
Wire.write(WHO_AM_I);
Wire.endTransmission();
Wire.requestFrom(addr, 1);
if (Wire.read() == 0x12) {
Serial.println("OK");
} else {
Serial.println("NG");
}
}
void loop() {
Wire.beginTransmission(addr);
Wire.write(ACCEL_XOUT_H);
Wire.endTransmission();
Wire.requestFrom(addr, 6);
accel[0] = (int)(Wire.read() << 8 | Wire.read()) / 16384.0;
accel[1] = (int)(Wire.read() << 8 | Wire.read()) / 16384.0;
accel[2] = (int)(Wire.read() << 8 | Wire.read()) / 16384.0;
Serial.print("ax:");
Serial.print(accel[0]);
Serial.print(",");
Serial.print("ay:");
Serial.print(accel[1]);
Serial.print(",");
Serial.print("az:");
Serial.print(accel[2]);
Serial.print(",");
Wire.beginTransmission(addr);
Wire.write(GYRO_XOUT_H);
Wire.endTransmission();
Wire.requestFrom(addr, 6);
gyro[0] = (int)(Wire.read() << 8 | Wire.read()) / 131.0;
gyro[1] = (int)(Wire.read() << 8 | Wire.read()) / 131.0;
gyro[2] = (int)(Wire.read() << 8 | Wire.read()) / 131.0;
Serial.print("wx:");
Serial.print(gyro[0]);
Serial.print(",");
Serial.print("wy:");
Serial.print(gyro[1]);
Serial.print(",");
Serial.print("wz:");
Serial.print(gyro[2]);
Serial.println("");
}
シリアルモニタ
シリアルプロッタ
